
Solid Constitutive Equation#
Solid Constitutive Equation = {model_name}
Description / Usage#
This required card specifies the constitutive equation used to control mesh motion and/ or the constitutive model describing solid material stress response to deformation. The single input parameter is defined as
{model_name} |
The name of the constitutive equation. The permissible values for {model_name} are dependent on the selection for the Mesh Motion type, that being one of ARBITRARY, LAGRANGIAN/DYNAMIC_LAGRANGIAN, or TOTAL_ALE. For an ARBITRARY Mesh Motion, {model_name} can be one of the following:
For a LAGRANGIAN, DYNAMIC_LAGRANGIAN, or TOTAL_ALE Mesh Motion, {model_name} can be one of the following:
|
The functional form of each of these equations is provided in the Technical Discussion with some important details.
Examples#
The following is a sample input card:
Solid Constitutive Equation = LINEAR
This equation type requires two elastic constants be specified, Lame Lambda and Lame Mu. This constitutive equation can be used for all Mesh Motion types. It is not recommended for large mesh deformations, even for ALE problems, because of spurious stresses generated by solid body translation or rotation.
Technical Discussion#
The general compressible form of Hooke’s Law, which applies to the LINEAR, NONLINEAR and HOOKEAN_PSTRAIN options, can be written as

Here \(\lambda\) is the Lame coefficient for volume expansion, \(\varepsilon\) is the volume strain measure whose definition depends on the model chosen, \(\mu\) is another elastic Lame coefficient for shear deformation, \(\underline {E}\) and is the chosen strain tensor, the form of which also depends on the constitutive model chosen.
The general incompressible form of Hooke’s Law, which applies to all INCOMP* options, can be written as:

with p being the solid phase pressure. An additional continuity equation is required in this case to account for the pressure (see Continuity equation card). Note, for these model options one must set the Lame LAMBDA coefficient to zero, or the pressure term and the expansion term are added together.
The volume change and strain tensors depend on the chosen solid constitutive equation and are as follows:
For the LINEAR option:

and
where \(\underline {d}\) is the displacement field vector, tr is the tensor trace operator, and the gradient operator (\(\Delta\)) is with respect to the deformed coordinates.
For all NONLINEAR models, we use the deformation gradient tensor as a building block:
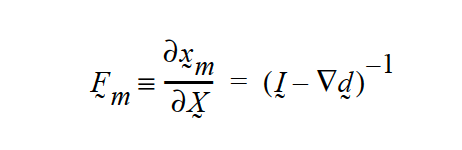
The “material coordinates” are \(\underline {X}\) and describe the original locations of all parcels of material in the domain; and the “current configuration/spatial coordinates” \(\underline {x}\) are the deformed mesh coordinates. Of course we have
for all LAGRANGIAN mesh motion cases. We define a Cauchy-Green tensor as:
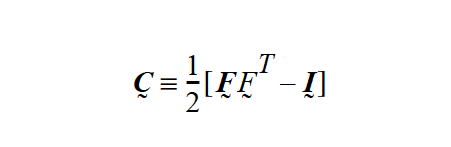
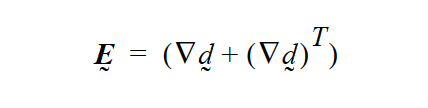
and invoke the linearized small strain theory (viz. that \(\Delta_x\) \(\underline{d}\) \(\equiv\) \(\Delta_x\) \(\underline {d}\)), and write

With these quantities, we form the volume strain and strain tensor for the various models:
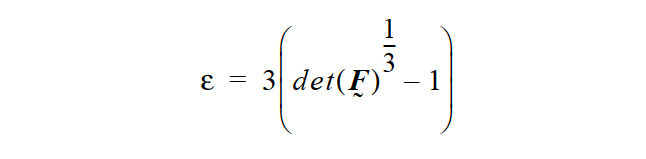
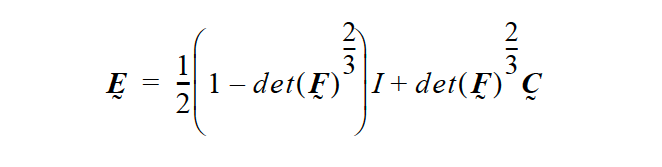
For NONLINEAR, INCOMP_PSTRAIN, INCOMP_3D, and HOOKEAN_PSTRAIN:
For INCOMP_PSTRAIN and INCOMP_3D we use:
For all other models we use \(\underline {E}\) = \(\underline {C}\). It is noteworthy that we use the linearized small strain theory for parts of the strain tensor, but the real Lagrangian deformation gradient for the volumetric strain. For elastoviscoplastic models and TOTAL_ALE solid mechanics, we do not invoke the linearized small strain theory.
Also noteworthy is that the elastic constants \(\lambda\) and \(\mu\) are related to the more well known bulk and Young’s moduli and the Poisson’s ratio by simple expressions (see Lame Mu and Lame Lambda cards).
Theory#
The incompressible options (i.e., INCOMP_PSTRAIN and INCOMP_PSTRESS and INCOMP_3D) use the theory of Segalman, et. al. (1992) to control mesh motion and couple the volume dilation to changes in solvent content. Plane strain implies that there is no deformation in the z-direction; plane stress implies there is no stress change in the z-direction.
References#
GT-005.3: THE NEW TOTAL-ARBITRARY-LAGRANGIAN-EULERIAN (TALE) CAPABILITY and its applicability to coating with/on deformable media, August 6, 1999, P. R. Schunk
SAND2000-0807: TALE: An Arbitrary Lagrangian-Eulerian Approach to Fluid- Structure Interaction Problems, P. R. Schunk (May 2000)
SAND96-2149: Drying in Deformable Partially-Saturated Porous Media: Sol-Gel Coatings, Cairncross, R. A., P. R. Schunk, K. S. Chen, S. S. Prakash, J. Samuel, A. J. Hurd and C. Brinker (September 1996)
Segalman, D., W. Witkowski, D. Adolf, M. Shahinpoor, “Theory and Application of Electrically Controlled Polymeric Gels”, Smart Mater. Struct. 1:95-100 (1992).